随着模块化工业机械臂在Precision和H&P钻井平台上的安装,陆地钻井自动化迈出重要一步

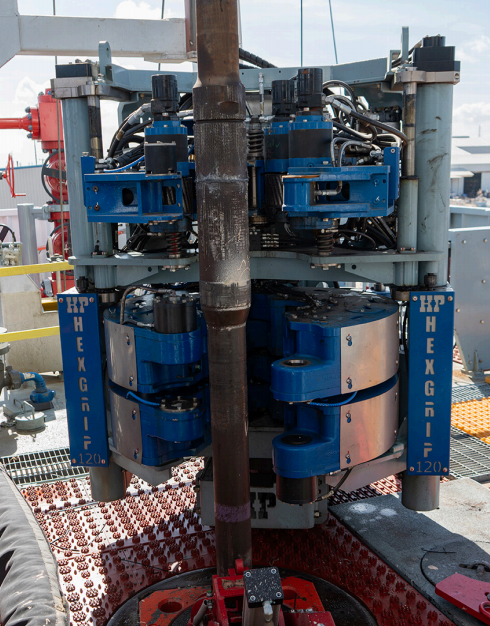
图1 NOV公司ATOM RTX(如图所示安装于H&P618号钻井平台)是两套工业机器人套装的核心组件,这两套套装要么已在北美陆地钻井平台投入运行,要么即将部署——分别是Precision Drilling公司的AlphaARMS和H&P公司的FlexRobotics。这些机械臂可装配一系列可定制的末端执行器,使其能够模拟钻井平台上的各类作业活动。它们还与钻井平台的过程控制系统及自动化应用相集成,从而无需司钻进行手动操作。
过去几十年里,行业始终在努力将人员从钻台“红色危险区域”撤离,这一工作已取得不同程度的成效。尽管钻台上的部分作业流程仍需人工操作——毕竟人类难以被完全替代,但自动化与机器人技术的融合,已大幅降低了钻台人工操作的不确定性,同时将工作人员调至更安全的岗位,使其远离危险区域。
国民油井华高公司(NOV)于 2022年推出的ATOM RTX系统便是如此。该系统以一系列机械臂为核心,充当流程自动化与钻台作业执行之间的机械化连接桥梁,可完成起下钻、在钻台及高架管架上扶持钻杆等任务。尽管此前已有一些机械化解决方案,但ATOM RTX是首款专为钻井平台研发的机械臂系统。事实证明,它能替代人工完成多种作业,这对那些希望扩大自动化应用范围的钻井承包商来说颇具价值。
行业内一直有这样的讨论:在红色危险区域周边作业,有没有更优的方法?在钻井平台上操作重型设备,有没有更好的方式?NOV公司钻机技术部门产品管理副总裁格雷厄姆・戴伊表示:“我们有能提供帮助的技术。这类技术在其他行业已应用多年,而我们让它在钻井作业环境中落地成为了可能。随着对该技术的认知度提升和使用熟练度增加,行业相关方逐渐达成共识。他们看到了技术的实际成效,也有足够信心部署这项技术,进而提高团队的安全性和作业效率。”
该系统在现场应用中成效显著。去年,它首次部署于加拿大蒙特尼页岩区Precision Drilling陆地钻井平台。在这个项目中,NOV机械臂与Precision公司AlphaAutomation软件应用相集成,形成AlphaARMS解决方案。
AlphaARMS系统实现95%的钻台作业自动化,通过减少7万多个人工操作环节,降低钻井作业的风险。
“说到机器人技术,我们面临不少挑战。比如钻具连接、起下钻、下套管作业,如何把员工过去几十年里打磨完善的作业流程,转化为机器人也能完成的操作?”Precision Drilling公司美国钻井业务副总裁罗布・休斯顿说:“我们确实想涉足这一领域,而我们在加拿大的客户也有同样的想法。这样一套系统能为我们提供许多以往没有的额外数据点,这让我们能够提升效率,在钻台作业及整个井眼建造过程中实现更高的一致性。”
NOV机器人系统也是H&P公司FlexRobotics系统的核心组件,该系统最近已安装在618号 FlexRig钻井平台上。该平台计划于9月部署至美国二叠纪盆地,并在当月月底开钻,它是H&P 公司船队中首个商业部署FlexRobotics系统的钻井平台。据H&P介绍,这也将是美国本土48州中首个配备工业机器人套装的钻井平台。
该公司表示,这套设备的目的是将作业人员从红色危险区域撤离,同时保持甚至提升同等水平的运营效率。公司期望,该技术在现场的成功应用能进一步引发运营商的关注与采用。
H&P公司产品管理总监托德・福克斯解释道:“通过这一钻井平台,我们致力于证明,配备机器人系统的钻井平台能够达到与非机器人钻井平台同等的钻井效率。至少,在实现更稳定作业执行的前提下,其性能不应下降——这本身就成为一项优势。此外,我们还致力于扩大该技术的应用规模。应用规模扩大后,经济性与优化效果将随之提升;而要扩大技术应用,就必须实现可预测且高效的作业表现。”
机械臂的研发背景
尽管如今陆地和海上钻井平台已在商业应用中采用了一些自动化管柱处理系统,但这类系统多是通过重新设计无人作业流程定制开发的,专门用于完成钻台任务。多数情况下,这会迫使钻台布局做出相应调整,导致企业需要时难以恢复人工操作流程。这也使得部分系统推广受限——不仅企业要为新技术投入大量资源,钻井平台还会被限制为只能使用自动化管柱处理及钻台设备。
相比之下,利用机器人技术复刻人工任务,可基本保持原有作业流程不变。这对技术应用而言是显著优势,因为大多数钻井平台现有的作业流程已成熟可控,且通过传统设备得到了充分验证。
“我们研发工具,尤其是机器人技术时,必须确保这些工具对钻井团队有用。”NOV公司自动化与机器人产品线经理布兰特・兰泽特表示,这套系统并非要取代人类,而是能在红色危险区域承担多项人工可完成的工作,发挥与人类同等的作用。NOV更倾向于将其视为改善作业环境的工具,让工作人员能脱身处理其他任务。

图2 NOV的陆地机器人系统包含两台安装在钻台轨道上的六轴机械臂(分别称为“L1”和“L2”),以及一台位于二层台的六轴机械臂(“U1”)。其中,U1负责井架工的所有钻杆搬运任务,L1承担扶管和对扣作业,L2则负责涂丝扣油、泥浆控制及对扣导向工作。
该系统的机械臂源自专业研发工业机器人系统的第三方制造商。为适配油田作业场景,NOV研发并加装了多种末端执行器——即连接在机器人“手腕”处的外围设备。这些执行器相当于机器人的“手”,能使其与周围环境交互,且专为模拟钻井平台的各类作业活动设计。
“这套机器人系统本身具备丰富功能,钻台扶管是其固有功能之一,集成泥浆桶功能也是其一。我们还对系统进行了配置,使其能完成涂丝扣油和对扣作业,这同样是其固有功能。但这些功能的另一特点是让系统具备了可配置性。比如我们与Precision公司合作时,他们希望增加扶套管功能,我们便设计了相应组件来实现。这就像iPhone,设备内置诸多应用程序作为固有功能,同时也支持定制化使用。” 戴伊解释道。
机械臂与末端执行器结合后,会集成到钻井平台的过程控制系统和自动化应用中,无需司钻手动操作机器人。司钻只需监督作业,并启动机器人需要执行的流程即可。设备的作业路径已预先规划,覆盖钻杆和套管处理的每个操作环节。
此外,该系统会持续监测钻柱stump高度(即钻柱在井口以下的残留高度)和井口中心位置,同时配备闸门安全系统,一旦检测到有人进入危险区域,会立即停止所有机器人的运动。
“我们的机器人并不实际搬运钻杆,因此无需配备能承受全部负载的重型设备。”兰泽特说:“我们借助钻井平台现有的吊卡和绞车来起吊钻杆,机器人仅作为导向机构使用。这和人工操作方式完全一致——就像井架工和钻台工负责扶管那样,我们让机器人做的是同样的工作。正因无需实际起吊设备,这套系统的占地面积得以控制在较小范围,且实现了模块化设计。”
尽管这套设备也可用于海上钻井平台,但最初是为复刻陆地钻井平台的作业流程研发的。在北美典型的陆地钻井作业中,为节省时间和成本,在一个井场批量钻探多口井是常见做法。因此,负责连接作业时操作钻杆和设备的工人(通常是一名井架工和两名钻台工),除了完成连接作业,还常需同时处理其他任务,比如丈量套管、采集泥浆或岩屑样本、进行设备维护等。每当需要进行连接作业时,他们就得回到钻台,这会打断手头的其他工作。
而通过ATOM RTX套装与自动化系统的协同,钻井团队成员无需再为这些高频连接作业往返钻台,得以专注于手头的其他任务而不受干扰。这有助于改善设备状况,从而增加钻井平台的有效作业时间,减少停机时间。
此外,由于这套机器人系统省去了人工连接环节,工作人员能有更多时间完成新作业前的各项准备工作,进而缩短非生产时间。
戴伊强调了机器人技术在改善钻台作业流程中的重要性:“对我们而言,想通过这套系统传递的核心是,钻井团队是作业顺利开展的关键。这一点必须得到重视——钻井团队是我们的最终用户。如果我们研发的技术能获得他们认可,且能为工作带来便利,他们自然会愿意使用。”
目前,这套机器人设备已在全球4台陆地钻井平台投入使用或签订交付合同;在海上钻井领域,已在1座自升式钻井平台和9艘钻井船上运行或签订交付合同。
不过,海上作业不会用到其管柱处理功能。这些机械臂会搭载用于涂丝扣油和泥浆控制的末端执行器,另有多项功能正处于不同研发阶段。
“海上钻井平台已配备大量机械化设备,能完成管柱导向等任务,也有实现流程自动化的系统。” 兰泽特说:“但仍有工作人员需要进入红色危险区域,从事涂丝扣油、操作钻杆吊卡的锁定环或套管接箍等工作,而这套系统非常适合完成这些任务。目前海上红色危险区域仍有多项人工操作,我们正针对这些场景研发可供机器人使用的工具。”
Precision公司在加拿大的应用案例
休斯顿表示,Precision公司之所以能参与这套机器人设备的应用,关键在于各方在恰当的时间处于了恰当的位置。2021年,他刚担任Precision公司钻机技术总监不久,关于在加拿大蒙特尼页岩区部署该技术的讨论就已启动。
他回忆道,在与NOV公司的初次交流中,机械臂的模块化设计就吸引了他。“目前行业内没有新建钻机的计划,所以模块化方案很有实际意义。”
在得克萨斯州纳瓦索塔的NOV试验钻机上开展的测试显示,这套机械臂系统既能保持模块化特性,又能充分融入钻机设计,将对钻机迁移的影响降至最低——仅使安装和拆卸时间增加约两小时。此外,若有需要,经过适当改造后,该系统还可移至船队中的其他钻机使用。而且,即便机械臂出现故障,所有管柱处理作业仍可手动完成,因为Precision公司仍有一级钻井平台资产可用,这为作业提供了额外的冗余保障。
“如果我在一台钻机上投入了资金,而合同发生变化,相比那些围绕机器人技术建造的钻机,我能更轻松地将这套设备转移到另一台钻机上。” 休斯顿说:“如果设备是固定安装的,会带来大量成本和风险。此外,我们不希望失去自主决策能力。如果客户想要更换钻杆柱,就需要一个足够灵活的系统,确保这种情况不会导致作业中断。”
Precision公司和运营商都认识到该技术在安全方面的价值,机器人技术有助于降低钻井过程中的风险。“我们希望实现闭环钻井。”休斯顿表示,自动化可以处理井下的所有工作,但钻台上仍然存在各种变量。这套系统的功能特性至关重要,他们需要一个能够复刻当前作业流程、而非另起炉灶的系统——就让机器人去做人类正在做的工作。
2023年初,这套系统首次安装在Precision公司的钻机上,进行部署前的测试。期间发现了若干问题,且都已针对性解决。例如,结合当前钻机设计和硬件布局,Precision公司发现存在电气干扰问题:当钻台上其他设备运行时,会导致机器人出现故障。原因在于NOV试验钻机与Precision钻机在布局上存在差异,主要是机械臂与现场设备间的距离不同。为解决该问题,公司安装了谐波滤波系统,以降低钻台周围的电气噪声。
另一个问题与钻柱设计和使用的标准化需求相关。如果运营商想根据井眼轨迹更改钻柱设计或调整钻柱中加重钻杆的数量,这类变更无法再临时进行,需要额外的预先规划,明确机器人如何排列和处理管柱。鉴于此,Precision公司在系统中融入了灵活性,使其能够适配多种钻柱设计,且调整过程几乎无需耗时。
研究还发现,极端天气会导致液压驱动设备(如吊卡和铁钻工)运行速度减慢。机械臂为电动,由伺服电机驱动,在寒冷天气(低于零下15华氏度)中也会出现运行减速的情况。通过在低温环境下使用不同的润滑脂,这一问题得到了缓解。
AlphaAutomation软件也进行了更新,新增“寒冷天气模式”:该模式会使机械臂持续进行小幅运动,以降低润滑脂的黏稠度。必要时,钻井平台还可启用电动加热套为机械臂保温。到调试阶段结束时,机器人技术支持团队已找到新颖且富有创意的方法,不仅改善了新设备在寒冷天气下的性能,也对现有设备进行了优化。
钻井团队在熟练掌握机械臂操作及与机械臂协同作业方面,也经历了一个学习过程。出于安全考虑,所有机器人操作序列都必须由司钻启动并确认后,才能进入流程的下一个序列。起初,所有司钻都是一次启动并监督一个序列直至完成;当他们对机械臂的运动方式及每个序列所需时间更加熟悉后,便可以利用多机控制功能将部分序列重叠进行。
例如,熟练操作后,司钻可以在钻台机器人完成当前任务的同时,启动游车上升,并触发井架工机器人程序,使其开始从指梁抓取钻杆立柱。由于不同司钻的连接作业时间存在差异,显然司钻个人对系统的熟练程度是通过机器人技术实现省时的关键因素。这些经验被收集起来分享给研发团队,随后被编写进操作程序中,以持续提升效率。
休斯顿指出,Precision公司及运营商此前在NOV训练钻机上进行的系统培训,以及虚拟模拟器培训,极大地缩短了钻井团队的学习周期。“我们让客户和司钻一起学习这套系统,这非常有助于让所有人都具备灵活应对的能力——运营商了解我们的技术能力,司钻也清楚运营商的需求。”
休斯顿表示,自2024年第一季度投入实际使用以来,这套设备在现场的表现 “超出了预期”。Precision最初计划实现仅80%的钻台作业自动化,这意味着钻井平台在20%的运行时间里,仍需要人员在钻台上亲自操作设备。
然而,该公司目前已实现95%的钻台作业自动化,大幅减少了主要负责连接作业的团队成员暴露在危险环境中的时间,超出预期。
与一台规格相同的传统姊妹钻机相比,在使用机器人处理重复性手动钻台任务的情况下,配备机器人的钻机上的工人每两周在钻台上的工作时间减少了约2.7天。这意味着他们在钻台上的累计工作时长减少了36%,而节省出的时间可用于钻机维护以及专注于缩短非生产时间。
这套机器人设备还带来了效率提升:与传统姊妹钻机相比,配备机器人的钻机在起钻作业的一致性方面提升了36%,下钻作业的一致性提升了21%。此处的“一致性”以每小时起下钻立柱数量的标准差来衡量。
休斯顿表示,Precision公司目前对该系统的主要关注点是将其推广到其他钻机,并吸引更多运营商参与,关于未来项目的相关洽谈正在推进中。
“我认为在推广这项技术的过程中,我们各方都肩负着责任。作为钻井承包商,我们可以做出战略性决策,实现钻台环境的标准化,这会让推广工作更易开展——因为我们会有许多风格极为相似、功能相同的钻机。客户必须成为合作伙伴,为我们提供这项技术能够成功的理由;我们还需要套管公司等支持服务方与我们合作,以便随时为下一步工作做好准备。要实现这一目标,需要众多相关方协同合作。”
H&P公司在二叠纪盆地钻机上的技术部署
NOV为H&P公司的FlexRobotics设备套件提供了ATOM机械臂。该套件近期已安装在休斯顿的 618号FlexRig钻机上,计划于9月转移至二叠纪盆地。
此次安装与NOV公司机械臂的原始设计并无明显差异—— 一个机械臂位于钻台的绞车前方,另一个部署在司钻房附近的钻台上,第三个则安装在二层台,负责钻杆操作任务。
此外,NOV公司还在钻台上配备了stump高度检测系统和危险区域管理系统,并对机械臂的代码进行了更新,以实现与H&P公司自动化应用程序的无缝集成。
图3 H&P公司618号钻井平台已安装闸门安全系统,用于保障作业人员安全——一旦检测到有人进入危险区域,系统会立即终止所有机器人的运动。
福克斯表示:“NOV的代码与H&P的代码协同运行。我们的独特优势在于,能在钻机上自主开发并实施所有控制代码,因此无需完全依赖原始设备制造商(OEM),就能独立确保所有系统正常运转。作业交接给机械臂时,由NOV的操作代码控制其运行;而当机械臂将作业交还给我们的设备时,我们的代码会继续执行操作。钻台上多项作业同步进行——绞车在运转,钻具包在移动,卡瓦在安放。”
H&P公司于2022年首次与NOV及一家作业公司就该机器人套件展开洽谈,同年9月下达了该系统的首批订单。2024年5月,NOV在位于俄克拉荷马州塔尔萨市的H&P研发中心918号FlexRig 钻机上安装了机械臂原型机,启动初步测试。此次测试相对简单,主要目的是确保系统按预期运行、达到预设关键绩效指标(KPIs)、保证钻机操作人员的学习曲线不过于陡峭,以及验证该系统与钻机操作代码及设备区域管理系统的兼容性。
福克斯表示:“设计阶段,我们就希望尽可能减少司钻的额外工作量。将该技术安装到618号FlexRig钻机前,我们已在研发用钻机上对其进行了数年评估,因此能与司钻们密切合作,将他们的反馈融入系统中。这里的作业交接与非自动化钻机上的方式类似,区别仅在于,他们是把钻杆交给机械臂,而非团队成员。”

 微信公众号
微信公众号
 微信视频号
微信视频号






 京公网安备11010502053156号
京公网安备11010502053156号